SAM4L-EK
Overview
The SAM4L series embeds picoPower technology for ultra-low power consumption. Combined power control techniques are used to bring active current consumption down to 90μA/MHz. The device allows a wide range of configurations giving the user the ability to balance between the lowest possible power consumption and the feature set selected for the application. The WAIT and RETENTION modes provide full logic and RAM retention, associated with fast wake-up capability (<1.5μs) and a very low consumption of, respectively, 3 μA and 1.5 μA. In addition, WAIT mode supports SleepWalking features. In BACKUP mode, CPU, peripherals and RAM are powered off consuming less than 0.9μA with external interrupt wake-up support.
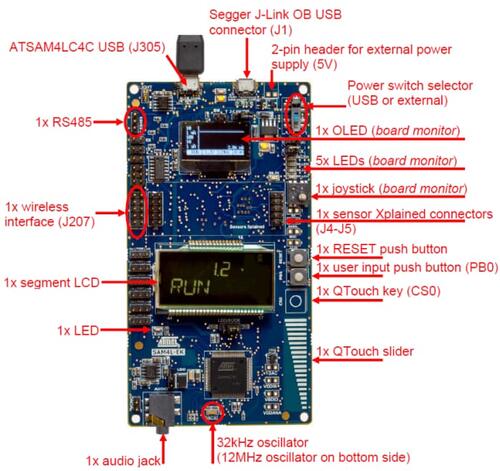
The SAM4L-EK is a full featured design to develop for Atmel SAM4L SoC series. The kit is equipped with a rich set of peripherals that make the ATSAM4L-EK a perfect evaluation platform. Download the SAM4L-EK Online User Guide [1] for more details.
Hardware
ATSAM4LC4C ARM Cortex-M4 Processor
12 MHz crystal oscillator
32.768 kHz crystal oscillator
1 Micro-AB USB OTG host/device
1 AT86RF2xx IEEE 802.15.4 transceiver connector
1 RS-485 full duplex interface
1 Sensor Xplained board connector
1 Audio Jack connector 3.5mm
1 Dedicated Board Monitor MCU
Power measurement (VDDIN, VDDIO, VDDANA)
1 OLED Display (128x64)
5 LEDs
1 Joystick
1 USART
1 TWI
1 40x4 LCD Segment Display
1 user touch button and One user pushbutton
1 user LED
1 QTouch Slider
1 QTouch Button
1 TEMT6000 Light Sensor
1 AT25DF641A Serial NOR Flash
Supported Features
The sam4l_ek board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
MPU |
on-chip |
arch/arm |
NVIC |
on-chip |
arch/arm |
SYSTICK |
on-chip |
systick |
COUNTER |
on-chip |
counter |
GPIO |
on-chip |
gpio |
HWINFO |
on-chip |
Unique 120 bit serial number |
SPI |
on-chip |
spi |
TRNG |
on-chip |
entropy |
TWIM |
on-chip |
i2c master port-interrupt |
USART |
on-chip |
serial port |
USB |
on-chip |
usb device |
Other hardware features are not currently supported by Zephyr.
The default configuration can be found in the Kconfig boards/atmel/sam/sam4l_ek/sam4l_ek_defconfig.
Connections and IOs
The SAM4L-EK Design Documentation [2] has detailed information about board connections. Download the SAM4L-EK Design Documentation [2] for more details.
System Clock
The SAM4L MCU is configured to use the 12 MHz internal oscillator on the board with the on-chip PLL to generate an 48 MHz system clock.
Serial Port
The ATSAM4LC4C MCU has 4 USARTs. One of the USARTs (USART2) is connected on the embedded debug unit and can works as a console. The USART0 is shared between all others headers and RS-485 port.
Programming and Debugging
The SAM4L-EK board have a Segger Embedded Debugger Unit J-Link OB. This provides a debug interface to the SAM4LC4C chip. You can use Ozone or JLink to communicate with the SAM4LC4C.
Flashing
Download JLink from the Segger JLink Downloads Page [3]. Go to the section “J-Link Software and Documentation Pack” and install the “J-Link Software and Documentation pack for Linux”. The application JLinkExe needs to be accessible from your path.
Run your favorite terminal program to listen for output. Under Linux the terminal should be
/dev/ttyACM0. For example:$ minicom -D /dev/ttyACM0 -o
The -o option tells minicom not to send the modem initialization string. Connection should be configured as follows:
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Connect the SAM4L-EK board to your host computer using the USB debug port. Then build and flash the Hello World application.
# From the root of the zephyr repository west build -b sam4l_ek samples/hello_world west flash
You should see “Hello World! sam4l_ek” in your terminal.
Debugging
You can debug an application in the usual way. Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b sam4l_ek samples/hello_world
west debug