EC Host Command
Overview
The host command protocol defines the interface for a host, or application processor, to communicate with a target embedded controller (EC). The EC Host command subsystem implements the target side of the protocol, generating responses to commands sent by the host. The host command protocol interface supports multiple versions, but this subsystem implementation only support protocol version 3.
Architecture
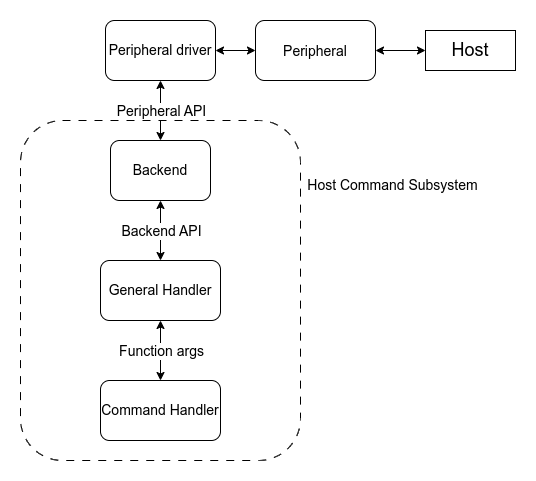
The Host Command subsystem contains a few components:
Backend
General handler
Command handler
The backend is a layer between a peripheral driver and the general handler. It is responsible for sending and receiving commands via chosen peripheral.
The general handler validates data from the backend e.g. check sizes, checksum, etc. If the command is valid and the user has provided a handler for a received command id, the command handler is called.
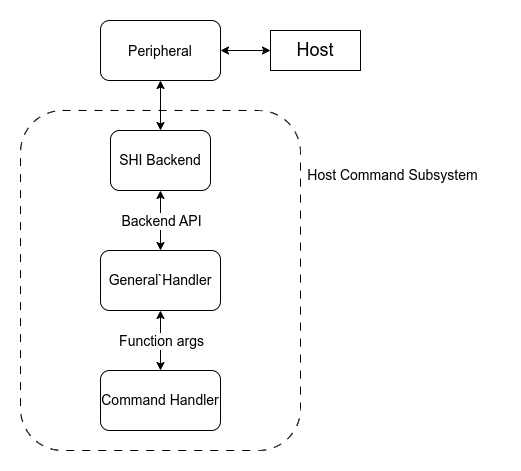
SHI (Serial Host Interface) is different to this because it is used only for communication with a host. SHI does not have API itself, thus the backend and peripheral driver layers are combined into one backend layer.
Another case is SPI. Unfortunately, the current SPI API can’t be used to handle the host commands communication. The main issues are unknown command size sent by the host (the SPI transaction sends/receives specific number of bytes) and need to constant sending status byte (the SPI module is enabled and disabled per transaction). It forces implementing the SPI driver within a backend, as it is done for SHI. That means a SPI backend has to be implemented per chip family. However, it can be changed in the future once the SPI API is extended to host command needs. Please check the discussion.
That approach requires configuring the SPI dts node in a special way. The main compatible string of a SPI node has changed to use the Host Command version of a SPI driver. The rest of the properties should be configured as usual. Example of the SPI node for STM32:
&spi1 {
/* Change the compatible string to use the Host Command version of the
* STM32 SPI driver
*/
compatible = "st,stm32-spi-host-cmd";
status = "okay";
dmas = <&dma2 3 3 0x38440 0x03>,
<&dma2 0 3 0x38480 0x03>;
dma-names = "tx", "rx";
/* This field is used to point at our CS pin */
cs-gpios = <&gpioa 4 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;
};
The STM32 SPI host command backend driver supports the st,stm32h7-spi and
st,stm32-spi-fifo variant implementations. To enable these variants, append the
corresponding compatible string. For example, to enable FIFO support and support for the STM32H7
SoCs, modify the compatible string as shown.
&spi1 {
compatible = "st,stm32h7-spi", "st,stm32-spi-fifo", "st,stm32-spi-host-cmd";
...
};
The chip that runs Zephyr is a SPI slave and the cs-gpios property is used to point our CS pin.
For the SPI, it is required to set the backend chosen node zephyr,host-cmd-spi-backend.
The supported backend and peripheral drivers:
Simulator
SHI - ITE and NPCX
eSPI - any eSPI slave driver that support
CONFIG_ESPI_PERIPHERAL_EC_HOST_CMDandCONFIG_ESPI_PERIPHERAL_CUSTOM_OPCODEUART - any UART driver that supports the asynchronous API
SPI - STM32
Initialization
If the application configures one of the following backend chosen nodes and
CONFIG_EC_HOST_CMD_INITIALIZE_AT_BOOT is set, then the corresponding backend
initializes the host command subsystem by calling ec_host_cmd_init():
zephyr,host-cmd-espi-backendzephyr,host-cmd-shi-backendzephyr,host-cmd-uart-backendzephyr,host-cmd-spi-backend
If no backend chosen node is configured, the application must call the ec_host_cmd_init()
function directly. This way of initialization is useful if a backend is chosen in runtime
based on e.g. GPIO state.
Buffers
The host command communication requires buffers for rx and tx. The buffers are be provided by the
general handler if CONFIG_EC_HOST_CMD_HANDLER_RX_BUFFER_SIZE > 0 for rx buffer and
CONFIG_EC_HOST_CMD_HANDLER_TX_BUFFER_SIZE > 0 for the tx buffer. The shared
buffers are useful for applications that use multiple backends. Defining separate buffers by every
backend would increase the memory usage. However, some buffers can be defined by a peripheral driver
e.g. eSPI. These ones should be reused as much as possible.
Logging
The host command has an embedded logging system of the ongoing communication. The are a few logging levels:
LOG_INF is used to log a command id of a new command and not success responses. Repeats of the same command are not logged
LOG_DBG logs every command, even repeats
LOG_DBG +
CONFIG_EC_HOST_CMD_LOG_DBG_BUFFERSlogs every command and responses with the data buffers
API Reference
- group ec_host_cmd_interface
EC Host Command Interface.
- Since
2.4
- Version
0.1.0
Defines
-
EC_HOST_CMD_HANDLER(_id, _function, _version_mask, _request_type, _response_type)
Statically define and register a host command handler.
Helper macro to statically define and register a host command handler that has a compile-time-fixed sizes for its both request and response structures.
- Parameters:
_id – Id of host command to handle request for.
_function – Name of handler function.
_version_mask – The bitfield of all versions that the _function supports. E.g. BIT(0) corresponds to version 0.
_request_type – The datatype of the request parameters for _function.
_response_type – The datatype of the response parameters for _function.
-
EC_HOST_CMD_HANDLER_UNBOUND(_id, _function, _version_mask)
Statically define and register a host command handler without sizes.
Helper macro to statically define and register a host command handler whose request or response structure size is not known as compile time.
- Parameters:
_id – Id of host command to handle request for.
_function – Name of handler function.
_version_mask – The bitfield of all versions that the _function supports. E.g. BIT(0) corresponds to version 0.
Typedefs
-
typedef int (*ec_host_cmd_backend_api_init)(const struct ec_host_cmd_backend *backend, struct ec_host_cmd_rx_ctx *rx_ctx, struct ec_host_cmd_tx_buf *tx)
Initialize a host command backend.
This routine initializes a host command backend. It includes initialization a device used to communication and setting up buffers. This function is called by the ec_host_cmd_init function.
- Param backend:
[in] Pointer to the backend structure for the driver instance.
- Param rx_ctx:
[inout] Pointer to the receive context object. These objects are used to receive data from the driver when the host sends data. The buf member can be assigned by the backend.
- Param tx:
[inout] Pointer to the transmit buffer object. The buf and len_max members can be assigned by the backend. These objects are used to send data by the backend with the ec_host_cmd_backend_api_send function.
- Retval 0:
if successful
-
typedef int (*ec_host_cmd_backend_api_send)(const struct ec_host_cmd_backend *backend)
Sends data to the host.
Sends data from tx buf that was passed via ec_host_cmd_backend_api_init function.
- Param backend:
Pointer to the backed to send data.
- Retval 0:
if successful.
-
typedef void (*ec_host_cmd_user_cb_t)(const struct ec_host_cmd_rx_ctx *rx_ctx, void *user_data)
-
typedef enum ec_host_cmd_status (*ec_host_cmd_in_progress_cb_t)(void *user_data)
-
typedef enum ec_host_cmd_status (*ec_host_cmd_handler_cb)(struct ec_host_cmd_handler_args *args)
Enums
-
enum ec_host_cmd_status
Host command response codes (16-bit).
Values:
-
enumerator EC_HOST_CMD_SUCCESS = 0
Host command was successful.
-
enumerator EC_HOST_CMD_INVALID_COMMAND = 1
The specified command id is not recognized or supported.
-
enumerator EC_HOST_CMD_ERROR = 2
Generic Error.
-
enumerator EC_HOST_CMD_INVALID_PARAM = 3
One of more of the input request parameters is invalid.
-
enumerator EC_HOST_CMD_ACCESS_DENIED = 4
Host command is not permitted.
-
enumerator EC_HOST_CMD_INVALID_RESPONSE = 5
Response was invalid (e.g.
not version 3 of header).
-
enumerator EC_HOST_CMD_INVALID_VERSION = 6
Host command id version unsupported.
-
enumerator EC_HOST_CMD_INVALID_CHECKSUM = 7
Checksum did not match.
-
enumerator EC_HOST_CMD_IN_PROGRESS = 8
A host command is currently being processed.
-
enumerator EC_HOST_CMD_UNAVAILABLE = 9
Requested information is currently unavailable.
-
enumerator EC_HOST_CMD_TIMEOUT = 10
Timeout during processing.
-
enumerator EC_HOST_CMD_OVERFLOW = 11
Data or table overflow.
-
enumerator EC_HOST_CMD_INVALID_HEADER = 12
Header is invalid or unsupported (e.g.
not version 3 of header).
-
enumerator EC_HOST_CMD_REQUEST_TRUNCATED = 13
Did not receive all expected request data.
-
enumerator EC_HOST_CMD_RESPONSE_TOO_BIG = 14
Response was too big to send within one response packet.
-
enumerator EC_HOST_CMD_BUS_ERROR = 15
Error on underlying communication bus.
-
enumerator EC_HOST_CMD_BUSY = 16
System busy.
Should retry later.
-
enumerator EC_HOST_CMD_INVALID_HEADER_VERSION = 17
Header version invalid.
-
enumerator EC_HOST_CMD_INVALID_HEADER_CRC = 18
Header CRC invalid.
-
enumerator EC_HOST_CMD_INVALID_DATA_CRC = 19
Data CRC invalid.
-
enumerator EC_HOST_CMD_DUP_UNAVAILABLE = 20
Can’t resend response.
-
enumerator EC_HOST_CMD_MAX = UINT16_MAX
-
enumerator EC_HOST_CMD_SUCCESS = 0
Functions
-
struct ec_host_cmd_backend *ec_host_cmd_backend_get_espi(const struct device *dev)
Get the eSPI Host Command backend pointer.
Get the eSPI pointer backend and pass a pointer to eSPI device instance that will be used for the Host Command communication.
- Parameters:
dev – Pointer to eSPI device instance.
- Return values:
The – eSPI backend pointer.
-
struct ec_host_cmd_backend *ec_host_cmd_backend_get_shi_npcx(void)
Get the SHI NPCX Host Command backend pointer.
- Return values:
the – SHI NPCX backend pointer
-
struct ec_host_cmd_backend *ec_host_cmd_backend_get_shi_ite(void)
Get the SHI ITE Host Command backend pointer.
- Return values:
the – SHI ITE backend pointer
-
struct ec_host_cmd_backend *ec_host_cmd_backend_get_uart(const struct device *dev)
Get the UART Host Command backend pointer.
Get the UART pointer backend and pass a pointer to UART device instance that will be used for the Host Command communication.
- Parameters:
dev – Pointer to UART device instance.
- Return values:
The – UART backend pointer.
-
struct ec_host_cmd_backend *ec_host_cmd_backend_get_spi(struct gpio_dt_spec *cs)
Get the SPI Host Command backend pointer.
Get the SPI pointer backend and pass a chip select pin that will be used for the Host Command communication.
- Parameters:
cs – Chip select pin..
- Return values:
The – SPI backend pointer.
-
int ec_host_cmd_init(struct ec_host_cmd_backend *backend)
Initialize the host command subsystem.
This routine initializes the host command subsystem. It includes initialization of a backend and the handler. When the application configures the zephyr,host-cmd-espi-backend/zephyr,host-cmd-shi-backend/ zephyr,host-cmd-uart-backend chosen node and
CONFIG_EC_HOST_CMD_INITIALIZE_AT_BOOTis set, the chosen backend automatically calls this routine atCONFIG_EC_HOST_CMD_INIT_PRIORITY. Applications that require a run-time selection of the backend must setCONFIG_EC_HOST_CMD_INITIALIZE_AT_BOOTto n and must explicitly call this routine.- Parameters:
backend – [in] Pointer to the backend structure to initialize.
- Return values:
0 – if successful
-
int ec_host_cmd_send_response(enum ec_host_cmd_status status, const struct ec_host_cmd_handler_args *args)
Send the host command response.
This routine sends the host command response. It should be used to send IN_PROGRESS status or if the host command handler doesn’t return e.g. reboot command.
- Parameters:
status – [in] Host command status to be sent.
args – [in] Pointer of a structure passed to the handler.
- Return values:
0 – if successful.
-
void ec_host_cmd_rx_notify(void)
Signal a new host command.
Signal that a new host command has been received. The function should be called by a backend after copying data to the rx buffer and setting the length.
-
void ec_host_cmd_set_user_cb(ec_host_cmd_user_cb_t cb, void *user_data)
Install a user callback for receiving a host command.
It allows installing a custom procedure needed by a user after receiving a command.
- Parameters:
cb – [in] A callback to be installed.
user_data – [in] User data to be passed to the callback.
-
const struct ec_host_cmd *ec_host_cmd_get_hc(void)
Get the main ec host command structure.
This routine returns a pointer to the main host command structure. It allows the application code to get inside information for any reason e.g. the host command thread id.
- Return values:
A – pointer to the main host command structure
-
FUNC_NORETURN void ec_host_cmd_task(void)
The thread function for Host Command subsystem.
This routine calls the Host Command thread entry function. If
CONFIG_EC_HOST_CMD_DEDICATED_THREADis not defined, a new thread is not created, and this function has to be called by application code. It doesn’t return.
-
int ec_host_cmd_add_suppressed(uint16_t cmd_id)
Add a suppressed command.
Suppressed commands are not logged. Add a command to be suppressed.
- Parameters:
cmd_id – [in] A command id to be suppressed.
- Return values:
0 – if successful, -EIO if exceeded max number of suppressed commands.
-
struct ec_host_cmd_rx_ctx
- #include <backend.h>
Context for host command backend and handler to pass rx data.
Public Members
-
uint8_t *buf
Buffer to hold received data.
The buffer is provided by the handler if CONFIG_EC_HOST_CMD_HANDLER_RX_BUFFER_SIZE > 0. Otherwise, the backend should provide the buffer on its own and overwrites buf pointer and len_max in the init function.
-
size_t len
Number of bytes written to buf by backend.
-
size_t len_max
Maximum number of bytes to receive with one request packet.
-
uint8_t *buf
-
struct ec_host_cmd_tx_buf
- #include <backend.h>
Context for host command backend and handler to pass tx data.
Public Members
-
void *buf
Data to write to the host The buffer is provided by the handler if CONFIG_EC_HOST_CMD_HANDLER_TX_BUFFER_SIZE > 0.
Otherwise, the backend should provide the buffer on its own and overwrites buf pointer and len_max in the init function.
-
size_t len
Number of bytes to write from buf.
-
size_t len_max
Maximum number of bytes to send with one response packet.
-
void *buf
-
struct ec_host_cmd_backend_api
- #include <backend.h>
-
struct ec_host_cmd
- #include <ec_host_cmd.h>
Public Members
-
struct k_sem rx_ready
The backend gives rx_ready (by calling the ec_host_cmd_send_receive function), when data in rx_ctx are ready.
The handler takes rx_ready to read data in rx_ctx.
-
enum ec_host_cmd_status rx_status
Status of the rx data checked in the ec_host_cmd_send_received function.
-
ec_host_cmd_user_cb_t user_cb
User callback after receiving a command.
It is called by the ec_host_cmd_send_received function.
-
struct k_sem rx_ready
-
struct ec_host_cmd_handler_args
- #include <ec_host_cmd.h>
Arguments passed into every installed host command handler.
Public Members
-
void *reserved
Reserved for compatibility.
-
uint16_t command
Command identifier.
-
uint8_t version
The version of the host command that is being requested.
This will be a value that has been static registered as valid for the handler.
-
const void *input_buf
The incoming data that can be cast to the handlers request type.
-
uint16_t input_buf_size
The number of valid bytes that can be read from input_buf.
-
void *output_buf
The data written to this buffer will be send to the host.
-
uint16_t output_buf_max
Maximum number of bytes that can be written to the output_buf.
-
uint16_t output_buf_size
Number of bytes of output_buf to send to the host.
-
void *reserved
-
struct ec_host_cmd_handler
- #include <ec_host_cmd.h>
Structure use for statically registering host command handlers.
Public Members
-
ec_host_cmd_handler_cb handler
Callback routine to process commands that match id.
-
uint16_t id
The numerical command id used as the lookup for commands.
-
uint16_t version_mask
The bitfield of all versions that the handler supports, where each bit value represents that the handler supports that version.
E.g. BIT(0) corresponds to version 0.
-
uint16_t min_rqt_size
The minimum input_buf_size enforced by the framework before passing to the handler.
-
uint16_t min_rsp_size
The minimum output_buf_size enforced by the framework before passing to the handler.
-
ec_host_cmd_handler_cb handler
-
struct ec_host_cmd_request_header
- #include <ec_host_cmd.h>
Header for requests from host to embedded controller.
Represent the over-the-wire header in LE format for host command requests. This represent version 3 of the host command header. The requests are always sent from host to embedded controller.
Public Members
-
uint8_t prtcl_ver
Should be 3.
The EC will return EC_HOST_CMD_INVALID_HEADER if it receives a header with a version it doesn’t know how to parse.
-
uint8_t checksum
Checksum of response and data; sum of all bytes including checksum.
Should total to 0.
-
uint16_t cmd_id
Id of command that is being sent.
-
uint8_t cmd_ver
Version of the specific cmd_id being requested.
Valid versions start at 0.
-
uint8_t reserved
Unused byte in current protocol version; set to 0.
-
uint16_t data_len
Length of data which follows this header.
-
uint8_t prtcl_ver
-
struct ec_host_cmd_response_header
- #include <ec_host_cmd.h>
Header for responses from embedded controller to host.
Represent the over-the-wire header in LE format for host command responses. This represent version 3 of the host command header. Responses are always sent from embedded controller to host.
Public Members
-
uint8_t prtcl_ver
Should be 3.
-
uint8_t checksum
Checksum of response and data; sum of all bytes including checksum.
Should total to 0.
-
uint16_t result
A ec_host_cmd_status response code for specific command.
-
uint16_t data_len
Length of data which follows this header.
-
uint16_t reserved
Unused bytes in current protocol version; set to 0.
-
uint8_t prtcl_ver