MEC2016EVB ASSY6797¶
Overview¶
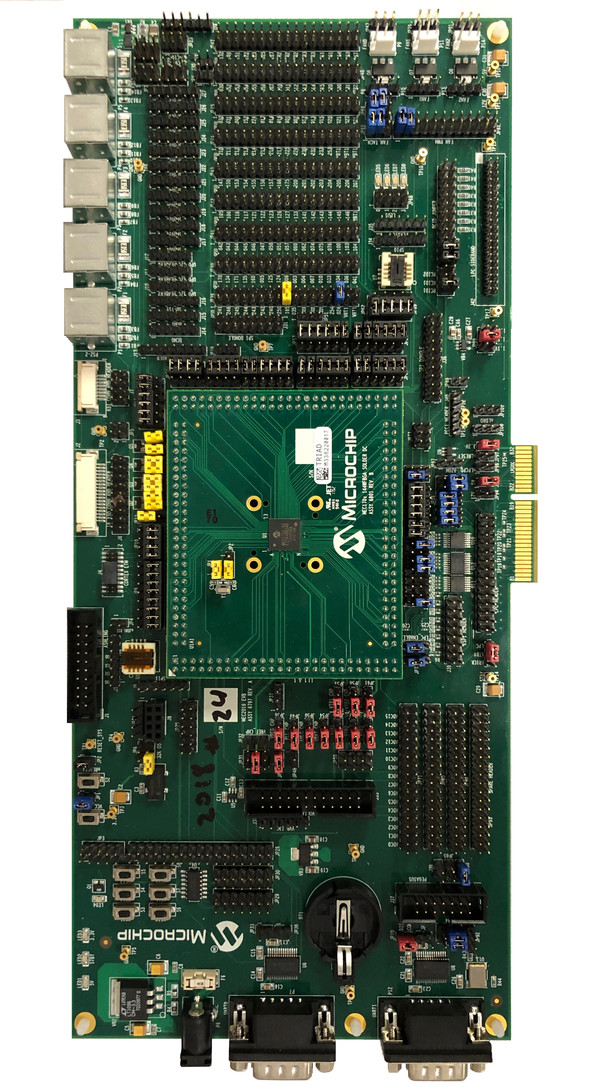
The MEC2016EVB_ASSY6797 kit is a development platform to evaluate the Microchip MEC1701X series microcontrollers. This board needs to be mated with part number MEC170X 144WFBA SOLDER DC ASSY 6801(cpu board) in order to operate.
Hardware¶
- MEC1701QC2SZ ARM Cortex-M4F Processor
- 480 KB Ram and 64 KB boot Rom
- 2 Microchip BC-Link Interconnection bus
- Keyboard interface
- ADC & GPIO headers
- UART0 and UART1
- FAN0, FAN1, FAN2 headers
- FAN PWM interface
- Jtag and Trace ports
- PECI interface 3.0
- I2C voltage translator
- 10 SMBUS headers
- 3 UDP I2C headers
- VCI interface
- 5 independent Hardware Driven PS/2 Ports
- eSPI header
- LPC sideband headers
- 4 Breathing/Blinking LEDs
- 2 Sockets for SPI NOR chips
- One reset and VCC_PWRDGD pushbuttons
For more information about the SOC please visit:
Supported Features¶
The mec2016evb_assy6797 board configuration supports the following hardware features:
| Interface | Controller | Driver/Component |
|---|---|---|
| NVIC | on-chip | nested vector interrupt controller |
| SYSTICK | on-chip | systick |
| UART | on-chip | serial port |
Other hardware features are not currently supported by Zephyr (at the moment)
The default configuration can be found in the Kconfig file:
boards/arm/mec2016evb_assy6797/mec2016evb_assy6797_defconfig
Connections and IOs¶
Microchip to provide the schematic for this board.
System Clock¶
The MEC1701 MCU is configured to use the 48Mhz internal oscillator with the on-chip PLL to generate a resulting EC clock rate of 12 MHz. See Processor clock control register (chapter 4 in user manual)
Serial Port¶
UART0 is configured for serial logs.
Jumper settings¶
Please follow the jumper settings below to properly demo this board. Advanced users may deviate from this recommendation.
Jump setting for MEC2016 EVB Assy 6797 Rev A1p0¶
Power-related jumpers.
| JP31 | JP32 | JP35 | JP36 | JP49 | JP50 | JP54 | JP55 |
|---|---|---|---|---|---|---|---|
| 1-2 | 1-2 | 1-2 | 1-2 | 1-2 | 1-2 | 1-2 | 1-2 |
| JP56 | JP57 | JP58 | JP60 | JP61 | JP102 |
|---|---|---|---|---|---|
| 1-2 | 1-2 | 1-2 | 1-2 | 1-2 | 2-3 |
These jumpers configure VCC Power good, nRESETI and JTAG_STRAP respectively.
| JP1 (VCC Power good) | JP2 (nRESETI) | JP51 (JTAG_STRAP) |
|---|---|---|
| 1-2 | 1-2 | 2-3 |
Each column of the following table illustrates how to enable UART0, JTAG, PVT SPI, SHD SPI and LED0-3 respectively.
| JP27 (UART0) | JP10 (JTAG) | JP34 (PVT SPI) | JP75 (SHD SPI) | JP68 (LED0-3) |
|---|---|---|---|---|
| 11-12 | 2-3 | 2-3 | 2-3 | 1-2 |
| 8-9 | 5-6 | 5-6 | 5-6 | 3-4 |
| 8-9 | 8-9 | 8-9 | 5-6 | |
| 11-12 | 11-12 | 11-12 | 7-8 | |
| 14-15 | 14-15 | |||
| 17-18 | 17-18 |
Jump settings for MEC170x 144WFBGA Socket DC Assy 6801 Rev B1p0¶
The jumper configuration explained above covers the base board. Now the CPU board requires the following settings.
| JP1 | JP2 |
|---|---|
| 1-2 | 2-3 |
Programming and Debugging¶
This board comes with a Cortex ETM port which facilitates tracing and debugging using a single physical connection. In addition, it comes with sockets for JTAG only sessions.
Flashing¶
Connect the SPI Dongle ASSY 6791 to J36 (SPI dongle) in order to flash and boot from SHD SPI NOR. Then proceed to flash using Dediprog SF100 or a similar tool for flashing SPI chips. Remember that SPI MISO/MOSI are swapped on dediprog headers!
Run your favorite terminal program to listen for output. Under Linux the terminal should be
/dev/ttyACM0. For example:$ minicom -D /dev/ttyACM0 -oThe -o option tells minicom not to send the modem initialization string. Connection should be configured as follows:
- Speed: 115200
- Data: 8 bits
- Parity: None
- Stop bits: 1
Connect the MEC2016EVB_ASSY_6797 board to your host computer using the UART0 port. Then build Hello World application. It is important to generate a binary with a new load address, for example do the following:
${OBJCOPY} --change-addresses -0xb0000 -O binary -S ${in_elf} ${out_bin}Once you obtain the binary, proceed to use the microchip tool mec2016_spi_gen in order to create the final binary. This binary is what you need to flash in your spi nor.
# On Linux/macOS cd $ZEPHYR_BASE/samples/hello_world mkdir build && cd build # On Windows cd %ZEPHYR_BASE%\samples\hello_world mkdir build & cd build # Use cmake to configure a Ninja-based build system: cmake -GNinja -DBOARD=mec2016evb_assy6797 .. # Now run ninja on the generated build system: ninja ninja flash
You should see “Hello World! mec2016evb_assy6797” in your terminal.
Debugging¶
You can debug an application in the usual way. Here is an example for the Hello World application.
# On Linux/macOS
cd $ZEPHYR_BASE/samples/hello_world
# If you already made a build directory (build) and ran cmake, just 'cd build' instead.
mkdir build && cd build
# On Windows
cd %ZEPHYR_BASE%\samples\hello_world
# If you already made a build directory (build) and ran cmake, just 'cd build' instead.
mkdir build & cd build
# Use cmake to configure a Ninja-based build system:
cmake -GNinja -DBOARD=mec2016evb_assy6797 ..
# Now run ninja on the generated build system:
ninja debug