NXP TWR-KV58F220M
Overview
The TWR-KV58F220M is a development board for NXP Kinetis KV5x 32-bit MCU-based platforms. The onboard OpenSDAv2 serial and debug adapter, running an open source bootloader, offers options for serial communication, flash programming, and run-control debugging.
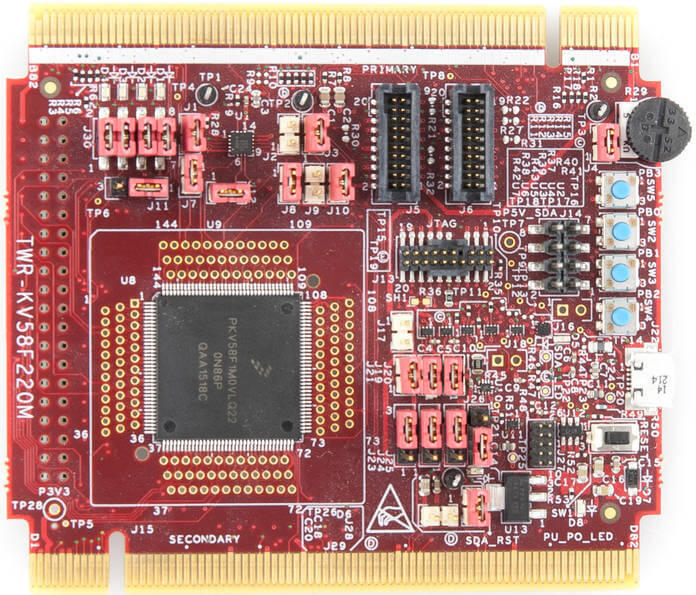
TWR-KV58F220M (Credit: NXP)
Hardware
MKV58F1M0VLQ24 MCU (up to 240 MHz, 1 MB flash memory, 256 KB RAM, and 144 Low profile Quad Flat Package (LQFP))
1.8 V or 3.3 V MCU operation
6-axis FXOS8700CQ digital accelerometer and magnetometer
Four user LEDs
Four user push-buttons
Potentiometer
Two general purpose TWRPI headers
Motor pin header
For more information about the KV5x SoC and the TWR-KV58F220M board, see these NXP reference documents:
Supported Features
The twr_kv58f220m board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
NVIC |
on-chip |
nested vector interrupt controller |
SYSTICK |
on-chip |
systick |
PINMUX |
on-chip |
pinmux |
GPIO |
on-chip |
gpio |
UART |
on-chip |
serial port-polling; serial port-interrupt |
FLASH |
on-chip |
soc flash |
I2C |
on-chip |
i2c |
SENSOR |
off-chip |
fxos8700 polling; fxos8700 trigger |
SPI |
on-chip |
spi |
ADC |
on-chip |
adc |
The default configuration can be found in the defconfig file: boards/nxp/twr_kv58f220m/twr_kv58f220m_defconfig.
Other hardware features are not currently supported by the port.
System Clock
The KV58 SoC is configured to use the 50 MHz external oscillator on the board with the on-chip PLL to generate a 237.5 MHz system clock.
Serial Port
The KV58 SoC has six UARTs. UART0 is configured for the console. The remaining UARTs are not used.
Accelerometer and magnetometer
The TWR-KV58F220M board by default only supports polling the FXOS8700
accelerometer and magnetometer for sensor values
(CONFIG_FXOS8700_TRIGGER_NONE=y).
In order to support FXOS8700 triggers (interrupts), shunts must be placed on
the jumpers J2 and J9. A trigger option also must be enabled in Kconfig
(either CONFIG_FXOS8700_TRIGGER_GLOBAL_THREAD=y or
CONFIG_FXOS8700_TRIGGER_OWN_THREAD=y).
Programming and Debugging
Build and flash applications as usual (see Building an Application and Run an Application for more details).
Configuring a Debug Probe
This board integrates an OpenSDA debug probe. However, it can currently only be used for flashing the KV58 SoC by copying the compiled firmware to the USB Mass Storage Device. The board cannot be debugged using the OpenSDA probe, since pyOCD does not support the target. The OpenSDA J-Link firmware (as of release 2019-06-03) also cannot be used, since the flash algorithm for the KV58 seems to be broken at the time of writing.
An external J-Link debug probe connected to the JTAG header J13 is used to debug the target.
Install the J-Link Debug Host Tools and make sure they are in your search path.
Using west:
# From the root of the zephyr repository
west build -b twr_kv58f220m samples/hello_world
Using CMake and ninja:
# From the root of the zephyr repository
# Use cmake to configure a Ninja-based buildsystem:
cmake -Bbuild -GNinja -DBOARD=twr_kv58f220m samples/hello_world
# Now run the build tool on the generated build system:
ninja -Cbuild
Configuring a Console
Even though the OpenSDA probe cannot be used for debugging, we will use it as a USB-to-serial adapter for the serial console.
Connect a USB cable from your PC to J22.
Use the following settings with your serial terminal of choice (minicom, putty, etc.):
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Flashing
Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b twr_kv58f220m samples/hello_world
west flash
Open a serial terminal, reset the board (press the SW1 button), and you should see the following message in the terminal:
***** Booting Zephyr OS v1.14.0-xxx-gxxxxxxxxxxxx *****
Hello World! twr_kv58f220m
Debugging
Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b twr_kv58f220m samples/hello_world
west debug
Open a serial terminal, step through the application in your debugger, and you should see the following message in the terminal:
***** Booting Zephyr OS v1.14.0-xxx-gxxxxxxxxxxxx *****
Hello World! twr_kv58f220m